
I've previously talked about ZX Evolution, the new "Spectrum" from Russia. What I did not mention there's something called the "TS-Conf", which makes more use of the underlying hardware. Don't ask me what it is, I don't fully understand myself. All I know it's not really a Spectrum anymore. It's maybe more comparable to the Amiga or some 1990s games consoles. Recently more demos and software have started to arrive on it. I've wanted to try it for a while, but very simple instructions seemed to be missing.
Now I at last found the time to make the configuration run. I used the soft reset key method of flashing the firmwares. This is just one way to install the TS-Conf, I think.
First:
Currently, the required files are perhaps best accessed from this forum post at TSlabs.
-Download the WildCommanderWide.$C file from the link that says about Wildcommander.
-Download the TS-CONF firmware zxevo_fw.bin from the first link that says "keyboard layout by NedoPC"
-Download the full 512kb ROM image zxevo.rom from the link that says "Full 512kB ROM image compatible with both TS and Base configs". This contains the TS BIOS. (Also as a separate file)
You need another firmware for flashing the zxevo.rom file. Following from this forum post, somewhat downwards, download the file from the link that says zxevo_fw.bin. The firmwares have the same name, so best have them in separate folders (first and second) or something...
Edit: As pointed out in the comments, the Test&Service firmware has an English language option. After booting, press CAPS LOCK to activate. I only updated a couple of the images. Anyone who wants to use these computers should figure out a little bit of Russian :)
Step by Step:
-Copy the zxevo.rom and the second zxevo_fw.bin to the SD root. (Remember to backup the existing files.)
-Flash the firmware: Turn on Evo while holding down the soft reset key. A LED should start flashing, you can release the key.
You should have something like this: (Left, in Russian. Right, in English)
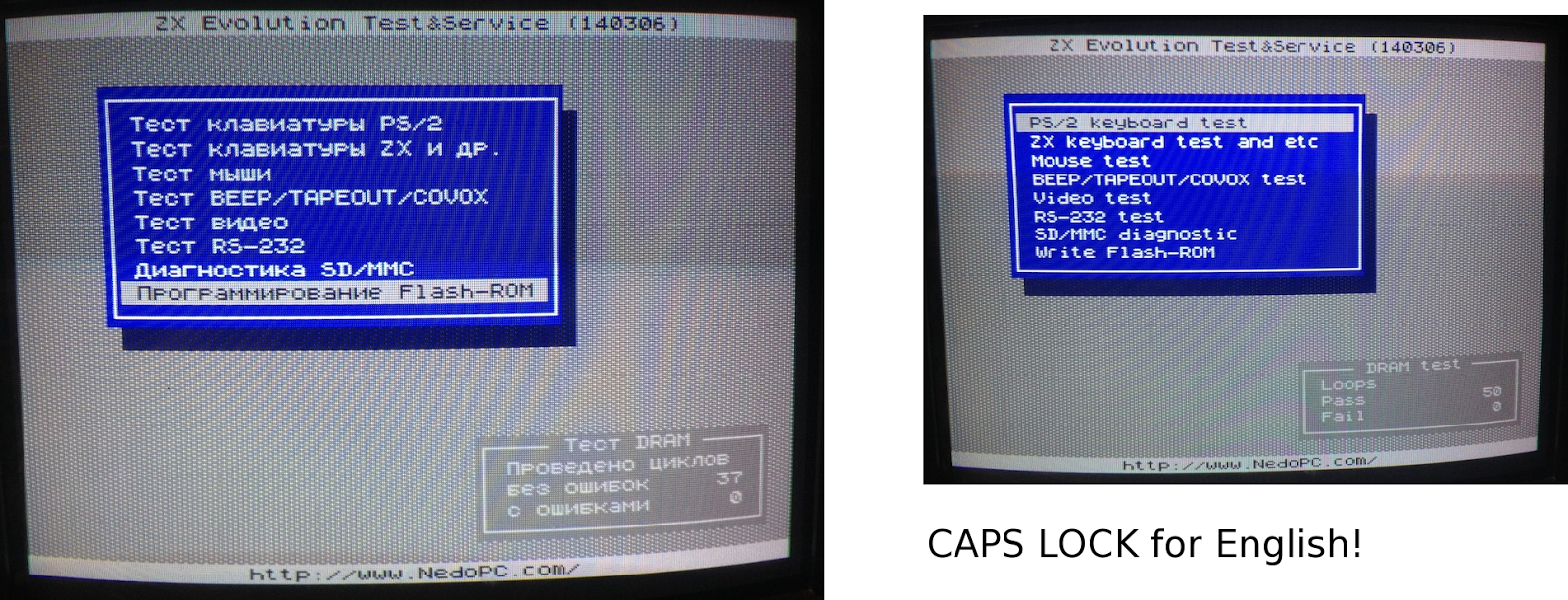
-Go to the last item on the menu and select it. (That says something about a Flash-ROM)
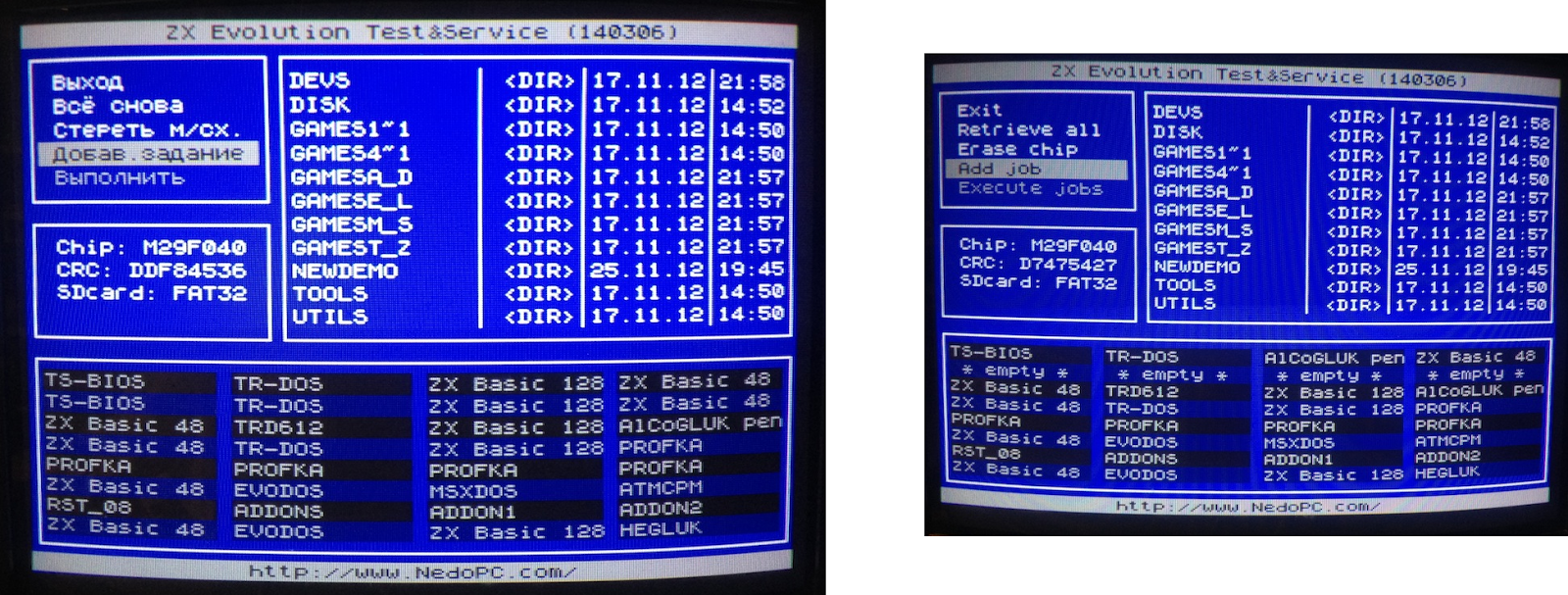
-Here, go to the second last item on the menu and select it.
-Go to the last item on the menu and select it. (That says something about a Flash-ROM)
-Here, go to the second last item on the menu and select it.

-Find the zxevo.rom file and select it.

-All the ROM slots will be yellow. Select.

-Go to the last item on the menu and select it.

-Press Y and wait...

-Everything OK. You can exit this menu from the top item.

-Now it's time to completely turn off the Evo.
-Copy the first zxevo_fw.bin to the SD card root. This is the actual TS-CONF firmware. Again, overwrite the previous zxevo_fw.bin.
-You should have the WildCommanderWide.$C. Rename it to boot.$c, and copy it on the SD root.
-Flash the firmware: Turn on Evo while holding down the soft reset key. A LED is should start flashing, you can release the key. You should see something like this:

-Change the "Reset to:" into BD boot.$c. Press RESET. (There's an alternate RESET that uses Caps Shift+RESET, that's why there is also a "CS Reset to:")
The Evo boots the boot.$c file. If all is well, you should be in the Wild Commander screen. If there is no boot file or it is incorrectly named, you will have a black/red "system meditation" screen.
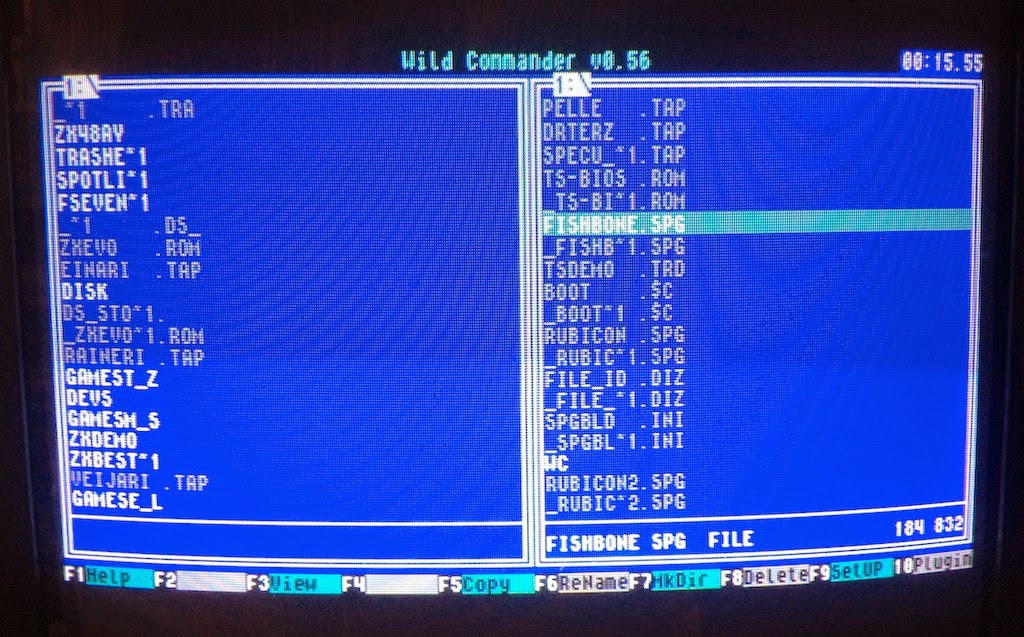
-Select a *.SPG file. I used this one for testing, you should of course copy it on the SD beforehand, or whatever you want to load. (It seems here you cannot load TRD images. Edit: Except if you install the required plug-ins. Check that link...)

That's it!


